Our stage by stage method to retrofit Alstom® systems
DCS are composed of 3 layers: supervision and control, PLC controlers & I/O racks.
In order to make the retrofit as fluid and threatless as possible, IEPC Energy modernizes these layers separately. This way, the retrofit process can be adapted to your production rythm and calendar, and each stage can be timed and organized in different phases. During each phase, the DCS system remains fully functional although it is migrating towards a new configuration.
Stage 1
Migrating to a new HMI without changing the controllers and the I/Os racks
At the end of this phase, a new supervision is installed, with improved ergonomy for the operators and better cybersecurity. This new HMI is fully compatible with the old controlers and fulfills the same functions the old one did (control, supervision, communication).
Stage 2
Migrating the logic using automated tools and replacing the controlers one by one
By carefully scheduling the replacement of each controler during this stage, we mitigate the effects of the retrofit on your production process. Each sub-system can be migrated and recommissioned separately, with intermediate milestones and validation tests.
Translating Alstom® logic to other PLC can be done using automated tools, preventing programming mistakes, or completely rewriten if necesary.
The diagrams below detail the process of the automated transfer from T20 controler and ALSPA controler to other PLCs
Stage 3
Migrating from the old I/Os racks to the new ones
The I/O racks are changed or adapted and connected to your new PLC controlers. IEPC Energy can implement a solution to migrate the I/Os without changing the marshalling and the wiring. This way, there is no need to validate each input and output and the old documentation remains consistent with the new system.
The modernization of this stage can be coupled with the modernization of stage 2.
Simulating the process to validate the behaviour of the new system
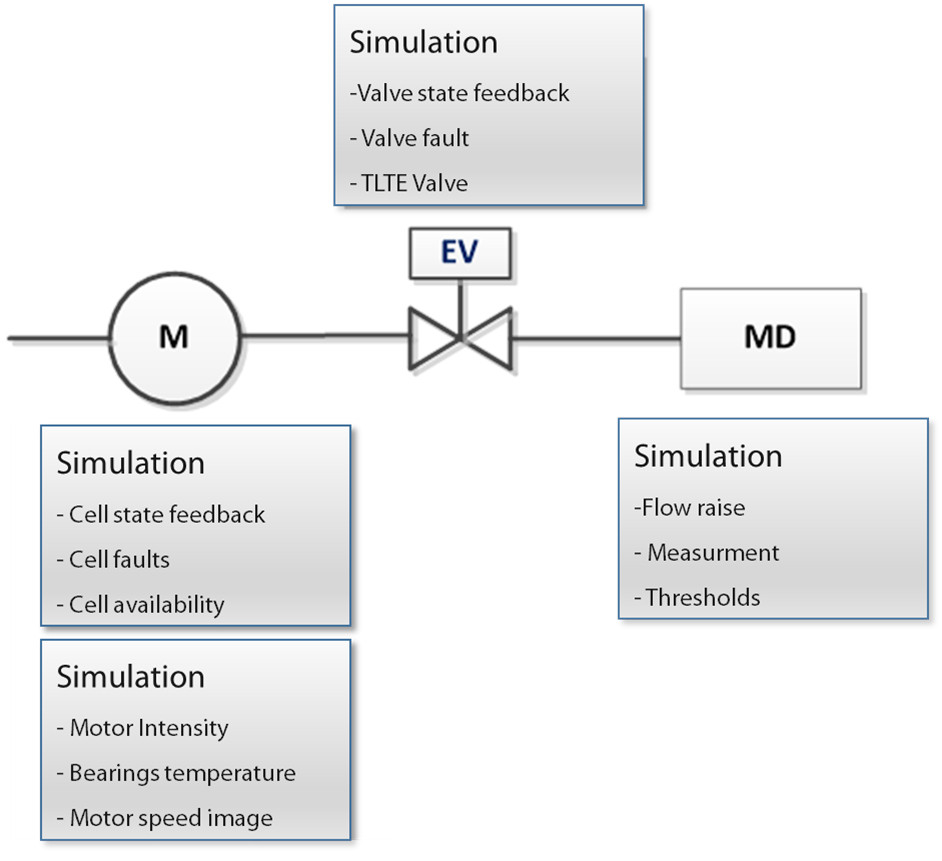
The behavioral simulation section aims to verify the proper behavior of the information recoding section of the automation-supervision pair. This simulation is not intended to perform a real, approximate simulation, but rather to simply respond to control commands by automatically integrating advanced feedback functions.
This simulation also serves to pre-position elementary systems in a nominal state in order to repeat any simulation function on demand from a stable state to a fallback state. The simulator is not embedded in the DCS source code to avoid disrupting the CPU load. The behavioral simulation section is developed by a dedicated team separate from the application development team to avoid creating a common development point.
The simulation section interfaces in place of the physical ES to avoid interfering with the internal PLC code under test. Each actuator and measurement block identified in the source code will generate a mirror simulation block allowing to define a (simple) behavior allowing a verification of the transcoding.